EOS❤️RL.env Notes
Update 2025.5.27
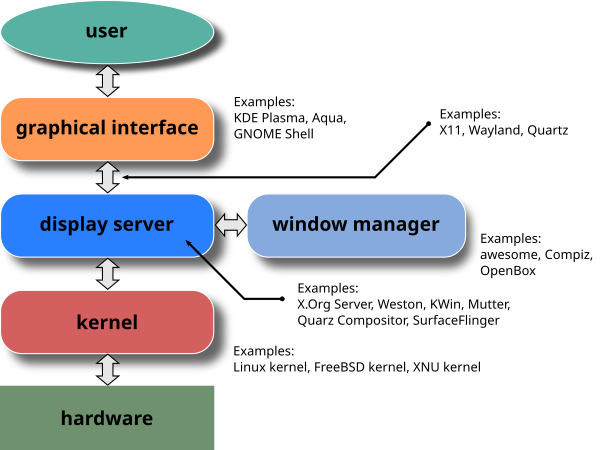
- Use x11(
wayland) + 150% Global scale - IBUS
- How to fix
volume is dirty and "force" flag is not set!:$sudo ntfsfix --clear-dirty /dev/sdaX1
How to install EOS
- BIOS/UEFI boot from USB, choose EOS NVIDIA
- update with
yay --mflags --nocheck -S python-future - yay -S openssh, enable sshd
- clash-verge-rev-bin, system proxy Use auto config URL, same as firefox
- install ibus-rime, enable ibus-wayland from system setting - vkeyboard, use
F4choose 简化字 - visual-studio-code-bin, vim, ?ccache
yay -S miniforgewith file.condarc:- 清华大学开源软件镜像站
- SUSTech Open Source Mirrors which contains nvidia
- PyTorch:
conda create -n isaac38 python=3.8 numpy pandas jupyterlab matplotlib tensorboard
conda activate isaac38
conda install pytorch==2.4.1 torchvision==0.19.1 torchaudio==2.4.1 pytorch-cuda=12.1 -c pytorch -c nvidia
# isaacgym:
# np.float to float
# export LD_LIBRARY_PATH=$CONDA_PREFIX/lib
# conda install -c conda-forge libstdcxx-ng
Conda: Saving environment variables
cd $CONDA_PREFIX
mkdir -p ./etc/conda/activate.d
mkdir -p ./etc/conda/deactivate.d
touch ./etc/conda/activate.d/env_vars.sh
touch ./etc/conda/deactivate.d/env_vars.sh
Isaac Gym
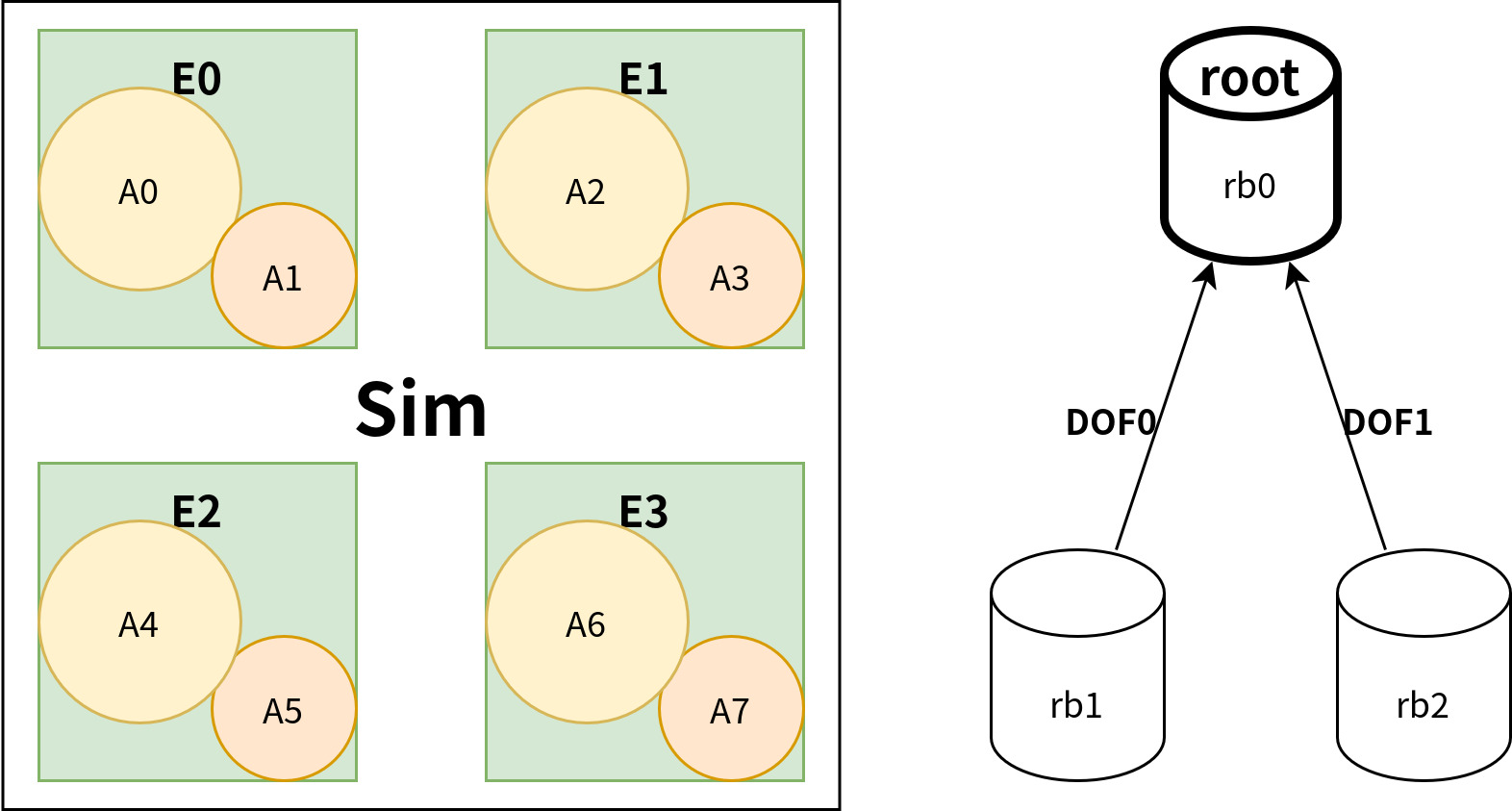

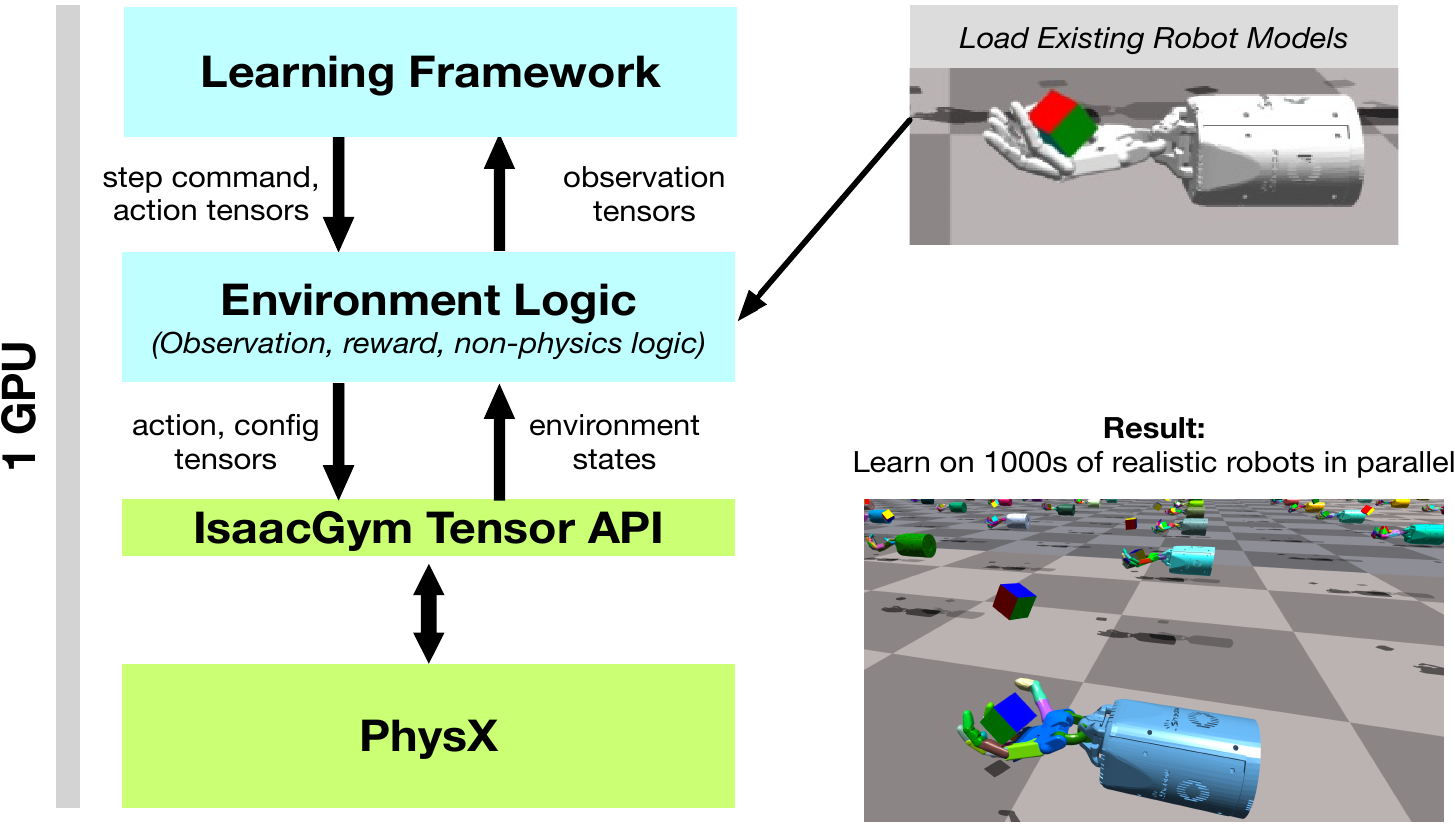
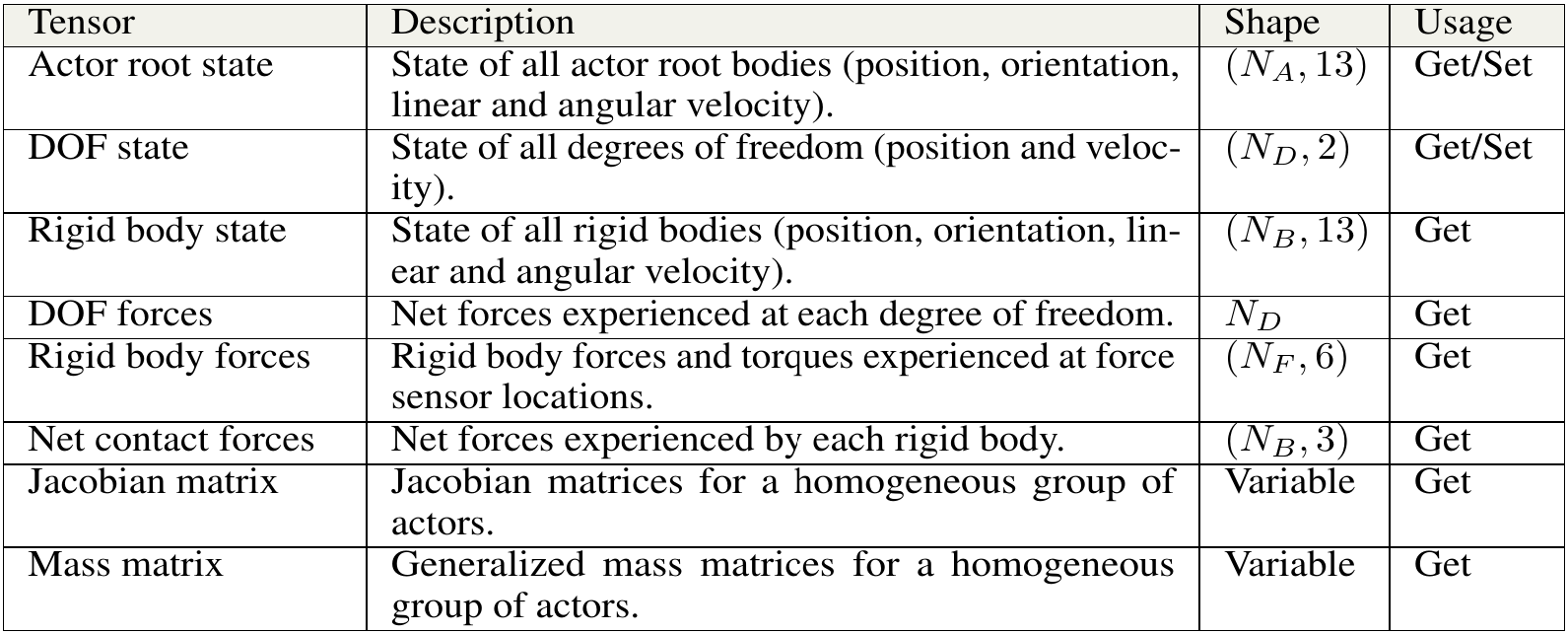
- robots are simulated using PhysX reduced coordinate articulations(root+dof, which usage are Get/Set)
- use Temporal Gauss Seidel (TGS) solver to compute the future states of objects in our physics simulation
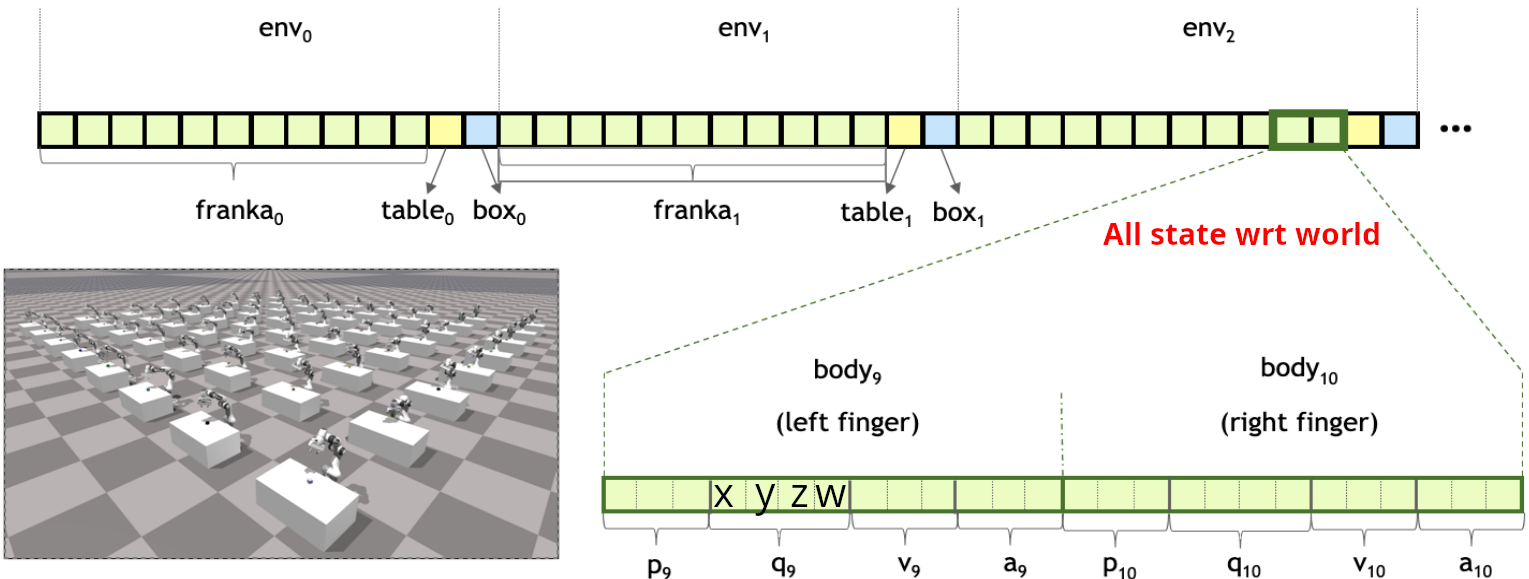
- actor = rigid bodies + joints(dof states)
- tensor API = data abstraction of PhysX
- access physics data in flat buffers. physics state is exposed to python users as global tensors
- the core of Isaac Gym is implemented using C++ and CUDA
- sim2real:
- asymmetric actor-critic & history
- domain randomization (friction, mass…)
- add noise to obs
- randomly push
- curriculum learning
- normalization
- delay
- armature
- actuator constrained
- IsaacGym 不支持 capsule 需用 cylinder
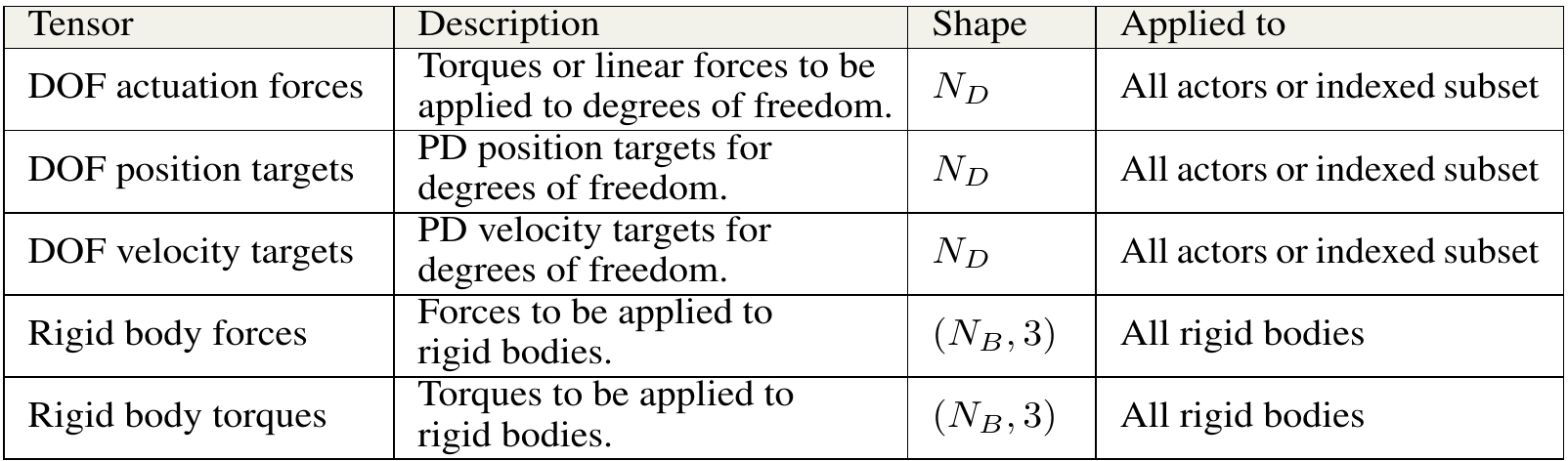
replace_cylinder_with_capsule = True set_xxxxxx_tensor_indexeduse actor indices- Whenever you call
unwrap_tensor, make sure that there is a Python reference to that tensor that will prevent it from being garbage-collected - Another limitation with the GPU pipeline is that tensor
refreshfunctions should be called only once per step, before any calls to tensor setter functions - Aggregates do not provide extra simulation functionality, but allow you to tell PhysX that a set of actors will be clustered together, which in turn allows PhysX to optimize its spatial data operations
- policy file:
logs/{experiment_name}/{load_run}/{checkpoint} - EmpiricalNormalization
| pkg | how to install | usage |
|---|---|---|
| PhysHOI | $pip install termcolor==1.1.0 rl-games==1.1.4 |
|
| urdfdom | $yay -S graphviz urdfdom |
|
| urdf-viz | $yay -S rust && cargo install urdf-viz |
$WINIT_UNIX_BACKEND=x11 urdf-viz file |
| BVHView | $XDG_SESSION_TYPE=x11 bvhview | |
| fbxreview | Windows | wine fbxreview.exe |
| blender | view . BVH . FBX | |
| usdview | yay -S usd |
QT_QPA_PLATFORM=xcb exe |
| choreonoid | yay -S cmake eigen fmt python-numpy assimp ode fcl with source |
QT_QPA_PLATFORM=xcb exe |
Isaac Sim enable Local Assets Packs
[settings]
persistent.isaac.asset_root.default = "/run/media/matheecs/BF0F1C9B0BED3510/isaacsim_assets/Assets/Isaac/4.5"
persistent.isaac.asset_root.cloud = "/run/media/matheecs/BF0F1C9B0BED3510/isaacsim_assets/Assets/Isaac/4.5"
persistent.isaac.asset_root.nvidia = "/run/media/matheecs/BF0F1C9B0BED3510/isaacsim_assets/Assets/Isaac/4.5"
exts."isaacsim.asset.browser".folders = [
"/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Robots",
"/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/People",
"/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/IsaacLab",
"/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Props",
"/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Environments",
"/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Materials",
"/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Samples",
"/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Sensors",
]
Setting the Default Nucleus Server
/opt/miniforge/envs/env_isaaclab/lib/python3.10/site-packages/omni/data/Kit/Isaac-Sim/4.5/user.config.json
"persistent": {
"isaac": {
"asset_root": {
"default": "/run/media/matheecs/BF0F1C9B0BED3510/isaacsim_assets/Assets/Isaac/4.5",
"cloud": "/run/media/matheecs/BF0F1C9B0BED3510/isaacsim_assets/Assets/Isaac/4.5",
"nvidia": "/run/media/matheecs/BF0F1C9B0BED3510/isaacsim_assets/Assets/Isaac/4.5",
"timeout": 5.0
}
}
}
+--------------------------------------------+
| LeggedLab & LeggedLabDeploy |
+--------------------------------------------+
| IsaacLab |
+--------------------------------------------+
| Isaac Sim |
+--------------------------------------------+
| Omniverse Kit=USD Physics RTX Carbonite UI |
+--------------------------------------------+
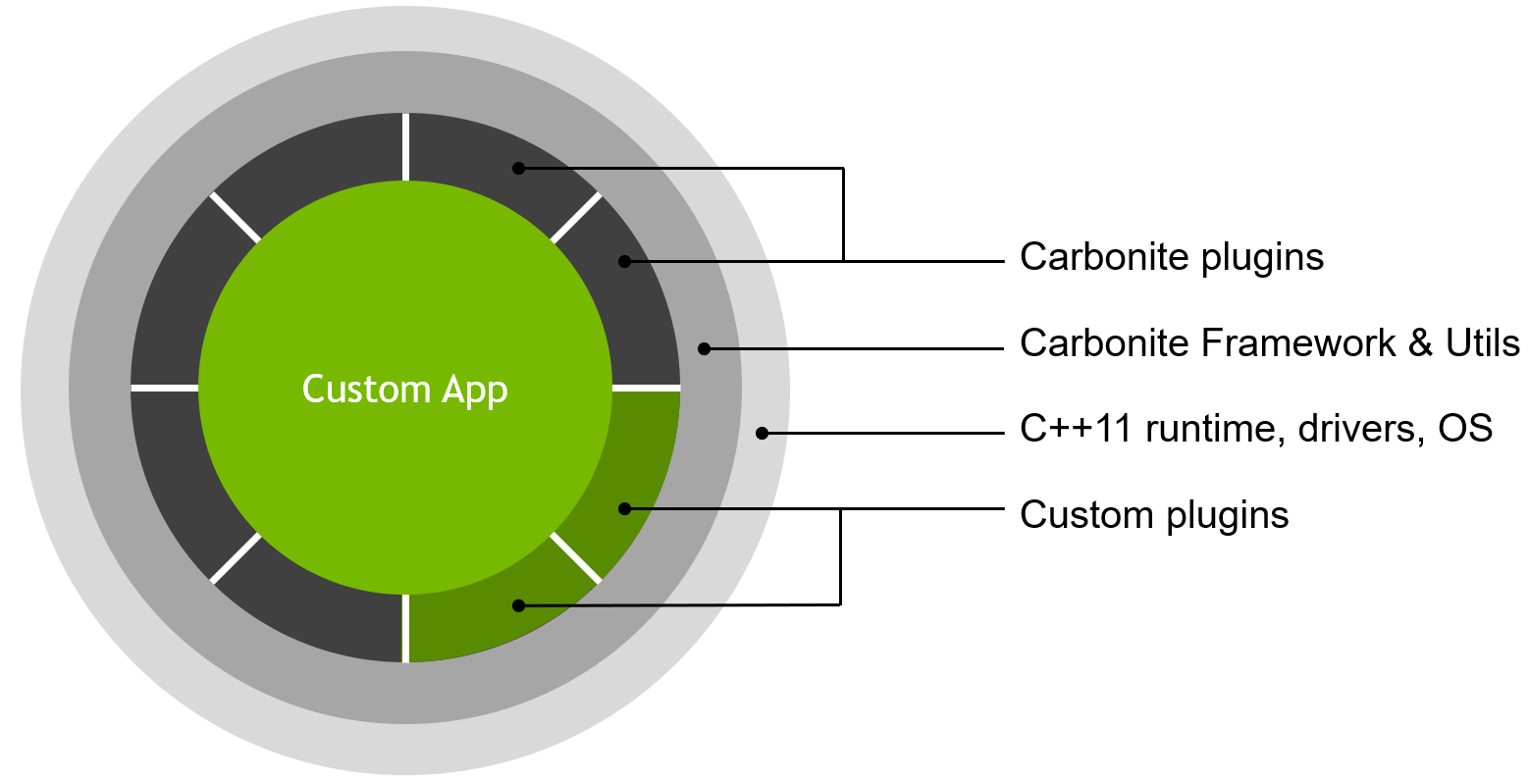
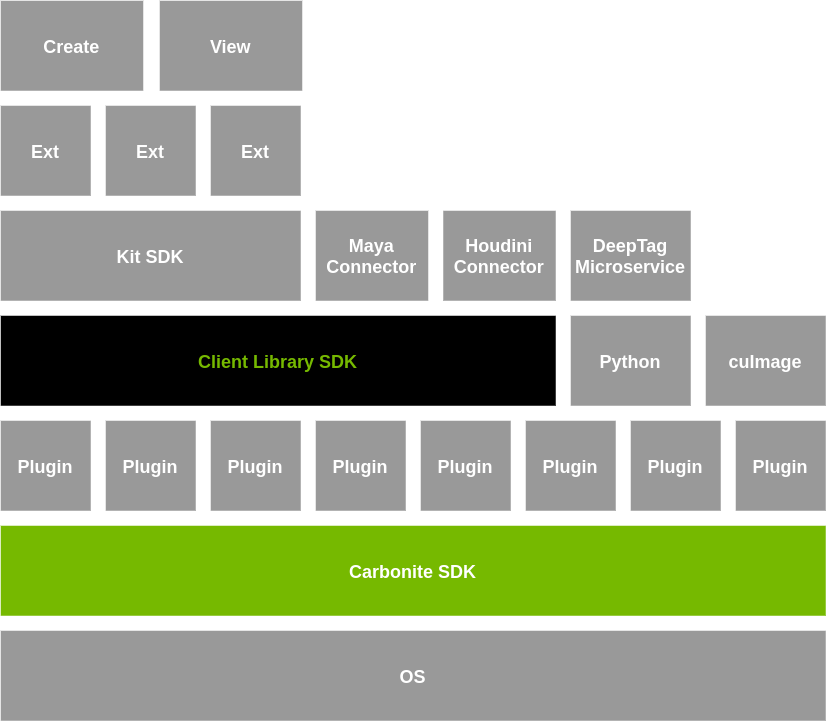
- Carbonite Architecture
- Legged Lab
- (Carbonite) ABI Stable Interfaces: Omniverse Native Interfaces = ONI
- Articulation and Robot Simulation Stability Guide
- Omniverse Physics
- spot-rl-example