Choreonoid Notes
Learning Material:
- https://choreonoid.org/ja/choreograph-tutorial
- https://choreonoid.org/ja/tutorial-videos.html
- YouTube: Humanoid Virtual Athletics Challenge 2024
- HUMANOID VIRTUAL ATHLETICS CHALLENGE 解説ブログ
- Humanoid Virtual Athletics Challenge
- Documentation
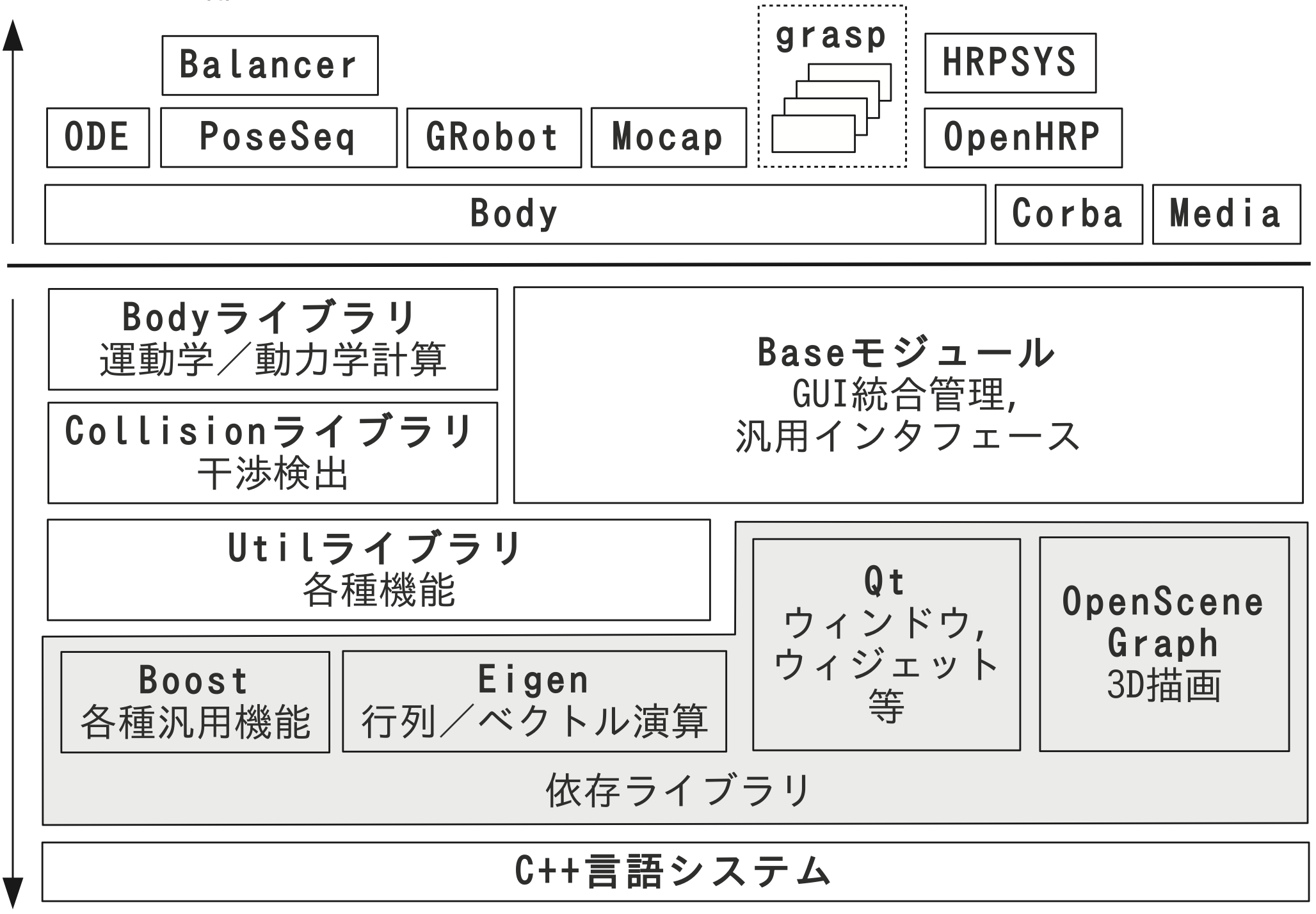
Design of the Framework
- plugin system
- view system
- item tree system
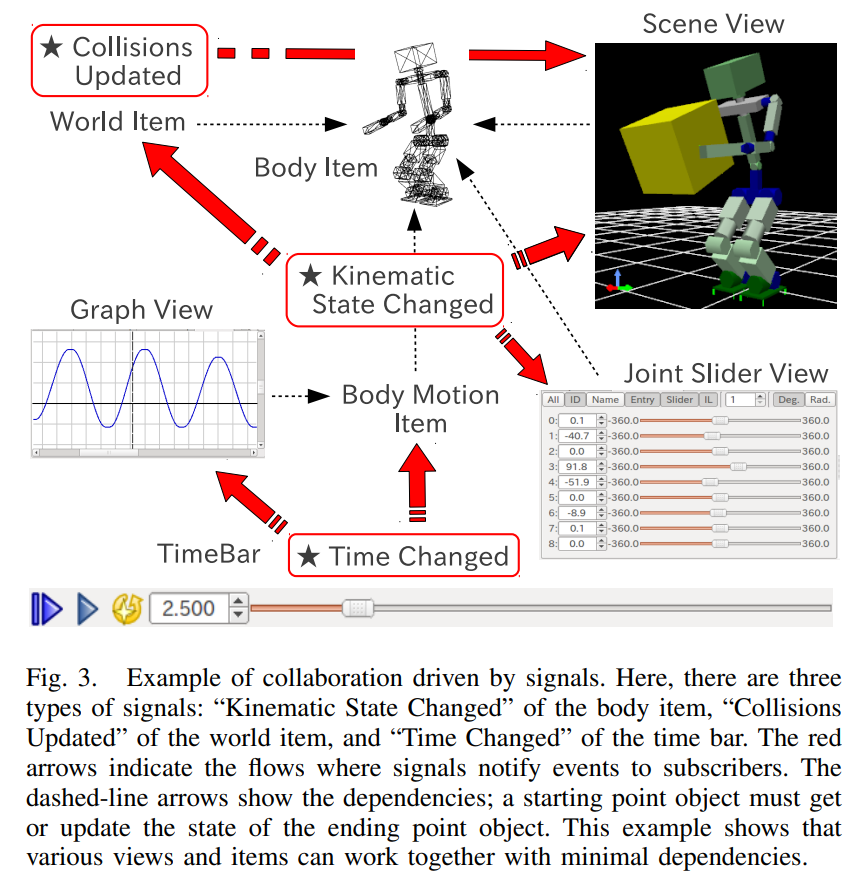
- signal system
Build with
./build/bin/choreonoid sample/PoseSeq/GR001.cnoid
cmake -Bbuild -GNinja -DCMAKE_BUILD_TYPE=Release -DCMAKE_EXPORT_COMPILE_COMMANDS=ON -DCMAKE_COLOR_DIAGNOSTICS=ON -DBUILD_POSE_SEQ_PLUGIN=ON -DBUILD_BALANCER_PLUGIN=ON -DBUILD_MOCAP_PLUGIN=ON -DBUILD_HRP4C_HANDLER=ON -DBUILD_MEDIA_PLUGIN=ON
URDF Model convert to Body Model
- File > New >
World - File > Load >
Body - Check BodyItem > Right Click >
Save as
Export Motion
Choose motion of PoseSeq > File > Save Selected Items As
create videos
View > Show Toolbar > MovieRecorderBar
enable media plugin
install libs:
sudo apt install libunwind-dev
sudo apt install gstreamer1.0-libav
rebuild:
cmake -Bbuild -DBUILD_MEDIA_PLUGIN=ON
追加情報の記述
standardPose: [
0, 0, 20, -40, -20, 0,
0, 0, -20, 40, 20, 0,
0, 0,
20, 0, -20,
-20, 0, 20 ]
linkGroup:
- name: UPPER-BODY
links:
- name: NECK
links: [ NECK_Y ]
- name: ARMS
links:
- name: R-ARM
links: [ R_SHOULDER_P, R_SHOULDER_R, R_ELBOW_P ]
- name: L-ARM
links: [ L_SHOULDER_P, L_SHOULDER_R, L_ELBOW_P ]
- name: CHEST
links: [ CHEST_P ]
- WAIST
- name: LOWER-BODY
links:
- name: LEGS
links:
- name: R-LEG
links: [ R_HIP_Y, R_HIP_R, R_HIP_P, R_KNEE_P, R_ANKLE_P, R_ANKLE_R ]
- name: L-LEG
links: [ L_HIP_Y, L_HIP_R, L_HIP_P, L_KNEE_P, L_ANKLE_P, L_ANKLE_R ]
possibleIkInterpolationLinks: [ WAIST, R_ANKLE_R, L_ANKLE_R ]
defaultIkInterpolationLinks: [ WAIST, R_ANKLE_R, L_ANKLE_R ]
defaultIKsetup:
WAIST: [ R_ANKLE_R, L_ANKLE_R ]
R_ANKLE_R: [ WAIST ]
L_ANKLE_R: [ WAIST ]
foot_links:
- link: L_ANKLE_R
sole_center: [ -0.005, 0.01, -0.022 ]
- link: R_ANKLE_R
sole_center: [ -0.005, -0.01, -0.022 ]
symmetricJoints:
- [ NECK_Y ]
- [ L_SHOULDER_P, R_SHOULDER_P, -1 ]
- [ L_SHOULDER_R, R_SHOULDER_R, -1 ]
- [ L_ELBOW_P, R_ELBOW_P, -1 ]
- [ L_HIP_Y, R_HIP_Y, -1 ]
- [ L_HIP_R, R_HIP_R, -1 ]
- [ L_HIP_P, R_HIP_P, -1 ]
- [ L_KNEE_P, R_KNEE_P, -1 ]
- [ L_ANKLE_P, R_ANKLE_P, -1 ]
- [ L_ANKLE_R, R_ANKLE_R, -1 ]
symmetricIkLinks:
- [ WAIST ]
- [ L_ANKLE_R, R_ANKLE_R ]
collision_detection_rules:
- disabled_link_chain_level: 2