Sequential Composition
Keywords:
- FSM 有限状态机
- BT 行为树
- Sequential Composition
- Behavior-Based Control
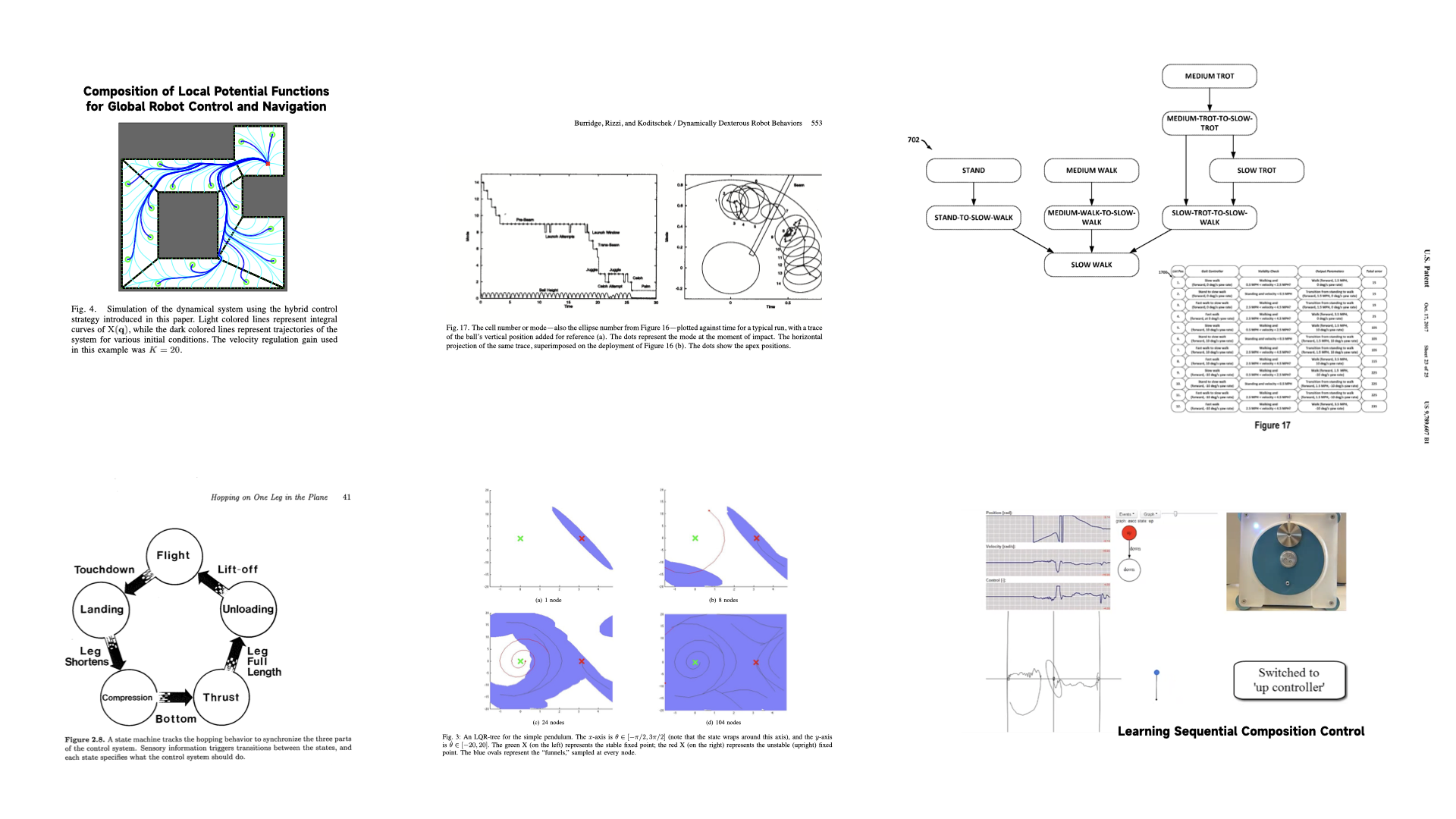
Sequential Composition 是一种控制复杂系统的策略:人工分解全局空间(分治思想),然后针对每个子空间(模块化解耦思想)定义较为简单的控制器(C_i)。考虑最终目标,以时间先后顺序组合生成控制器序列(C_0->C_1->—>C_n),然后依次调用这些控制器,执行任务。例如,Marc Raibert的单腿跳跃机器人控制系统解耦为三个子控制器(Hopping+Forward Speed+Body Attitude);Boston Dynamics的Spot机器人把各种不同参数的步态控制器(Gait Controller)作为子控制器,组合不同子控制器实现对四足机器人的稳定控制;LQR-Trees算法采用SOS优化方法计算出从初始状态到目标状态的若干离散吸引域(Region Of Attraction),然后对每个吸引域构造控制器并执行,即可实现最终目标。
Video: Sequential and Parallel Composition
Video: https://www.youtube.com/watch?v=NQvhPaZBCYo
Sequential Composition formalizes a sequence of tasks using backchaning of basins.
Ref:
- Legged Robots That Balance
- Composition of Local Potential Functions for Global Robot Control and Navigation
Demos from Esmaeil Najafi
从视频中直观理解 Sequential Composition 的作用
Video: https://www.youtube.com/watch?v=NF5ihL06SV4
Sequential composition is a supervisory control methodology that can address complex control specifications in nonlinear dynamical systems. It focuses on the interaction between a collection of predesigned controllers, each endowed with a DOA and a goal set. If the goal set of one controller lies in the DOA of another controller, which is defined as the prepare relation, the supervisor can instantly switch from the first controller to the second. This approach decomposes complex tasks into smaller and simpler tasks such that each can be solved using traditional stabiliza- tion and tracking control methods. The composition is usually represented by a supervisory finite-state machine that we call the control automaton, with each state (mode) associated with the specific controller, a corresponding DOA and a goal set. Sequential composition 是一种监督控制方法,可以解决非线性动态系统中复杂控制。它关注预先设计好的控制器集合之间的互动,每个控制器都有一个DOA和一个目标集。如果一个控制器的目标集位于另一个控制器的DOA中,这被定义为准备关系,监管者可以立即从第一个控制器切换到第二个。这种方法将复杂的任务分解成更小、更简单的任务,这样每个任务都可以用传统的稳定和跟踪控制方法来解决。组成通常由一个监督的有限状态机表示,我们称之为控制自动机,每个状态(模式)与特定的控制器、相应的DOA和目标集相关。
Cite: Learning Sequential Composition Control
How Behavior Trees Modularize Hybrid Control Systems
行为树与Sequential Composition、基于行为的控制和决策树的关系
We also show that BTs can be seen as generalizations of three classical concepts from the robot control literature, the subsumption architecture [19], sequential behavior compositions [20], and decision trees [21]. The subsumption architecture [19] is a control structure where a number of controllers are executed in parallel, and higher priority controllers subsume (or suppress), the lower priority ones, whenever needed. Sequential behavior compositions were introduced in [20] and built upon in, e.g., [22]. The key idea is that the region of attraction of a controller can be increased by combining a set of different controllers, where each controller drives the system state into the region of attraction of another controller, closer to the overall goal state. Decision trees [21] is a control structure where the controllers are found at the leaves of the tree, and the interior nodes of the tree represent state-dependent predicates, which determine what branches to follow from the root to one of the leaves.