解析ETH局部规划
局部规划器
Dependencies
| Names | Function |
|---|---|
| OMPL | 规划框架 |
| ODE | 碰撞检测 |
| OpenCV | 图像处理 |
| grid_map_core | 地图数据 |
| Boost | Graph/A* |
Terminology
- Clearance : 机器人与障碍物的距离
- Milestone : 图的节点
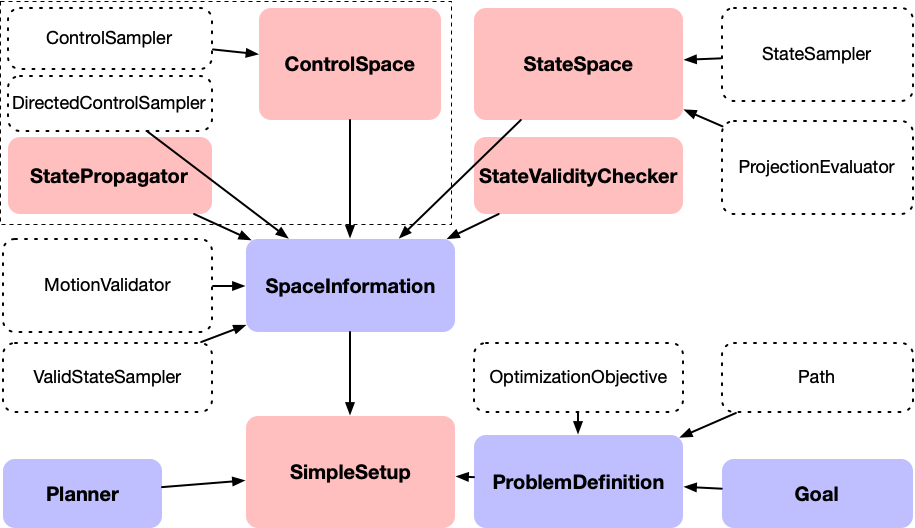
OMPL
LazyPRM is a planner that constructs a roadmap of milestones that approximate the connectivity of the state space, just like PRM does. The difference is that the planner uses lazy collision checking.
An OMPL Tutorial with Examples
Tech Areas
- Mobility (S3.1)
- Walking & Flying Robots
- Perception (S3.2)
- Calibration
- SLAM
- Elevation Mapping
- Autonomy
- Exploration Planner
- Navigation Planner
- BT
- Networking
- Artifacts Scoring
- Single Human Supervisor