MG400开发日志
1 MG400
MG400是越疆科技公司开发的一款4自由度机械臂.

2 开发接口
官方提供了基于TCP/IP协议的API:

TCP端口说明
29999端口(简称Dashboard端口)接收到客户端约定消息格式后会将结果反馈客户端30003端口用于机器人控制,单位 mm30004端口(简称实时反馈端口)每8ms反馈机器人的信息30005服务器端口每200ms反馈机器人的信息30006端口为可配置的反馈机器人信息端口(默认为每50ms反馈)
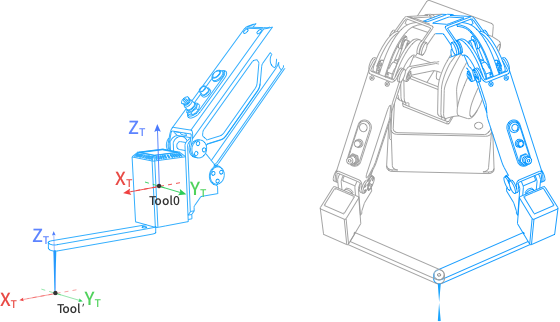
3 用户坐标系和工具坐标系
默认的用户坐标系和工具坐标系
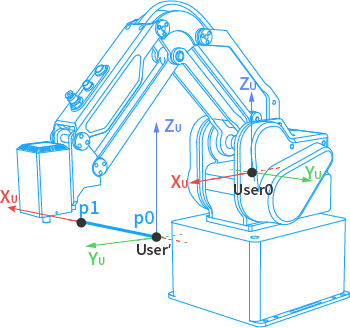
简单解释用户坐标系和工具坐标系就是:
- 用户坐标系表示参考系 Source
- 工具坐标系表示目标系 Target
注:MG400设置工具坐标系有Bug,固件版本 1.5.6!
那么用户坐标系与工具坐标系就能定义 SE(3) 空间的变换关系,常用变换矩阵 T_4x4 表示,最终转换为机械臂的控制输入量,比如目标位姿。MG400 支持用户自定义用户坐标系和工具坐标系,从而简化用户程序。
4 常用控制指令
MovJ/MovL: 移动至欧式空间的目标点JointMovJ: 移动至关节空间的目标点
5 部署方法
4.1 标定相机内参
采集完整棋盘格图像
import cv2
vid = cv2.VideoCapture(2)
vid.set(cv2.CAP_PROP_FRAME_WIDTH, 1920)
vid.set(cv2.CAP_PROP_FRAME_HEIGHT, 1080)
count = 0
while True and count <= 10:
ret, frame = vid.read()
cv2.imshow("frame", frame)
if cv2.waitKey(100) & 0xFF == ord("q"):
cv2.imwrite("img_" + str(count)+".jpg", frame)
count = count+1
continue
vid.release()
cv2.destroyAllWindows()
调用 OpenCV 标定
import numpy as np
import cv2 as cv
import glob
# termination criteria
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# prepare object points, like (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((11 * 8, 3), np.float32)
objp[:, :2] = np.mgrid[0:11, 0:8].T.reshape(-1, 2)
# Arrays to store object points and image points from all the images.
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.
images = glob.glob("*.jpg")
for fname in images:
img = cv.imread(fname)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Find the chess board corners
ret, corners = cv.findChessboardCorners(gray, (11, 8), None)
# If found, add object points, image points (after refining them)
if ret == True:
objpoints.append(objp)
corners2 = cv.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
imgpoints.append(corners)
# Draw and display the corners
cv.drawChessboardCorners(img, (11, 8), corners2, ret)
cv.imshow("img", img)
cv.waitKey(5)
cv.destroyAllWindows()
ret, mtx, dist, rvecs, tvecs = cv.calibrateCamera(
objpoints, imgpoints, gray.shape[::-1], None, None
)
print("\nRMS:", ret)
print("camera matrix:\n", mtx)
print("distortion coefficients: ", dist.ravel())
相机内参标定结果
RMS: 0.11316095150001748
camera matrix:
[[872.23857606 0. 955.39501163]
[ 0. 872.02928117 469.38217614]
[ 0. 0. 1. ]]
distortion coefficients: [-6.09149294e-03 -1.06957983e-02 1.72208316e-05 5.13094084e-05 -4.37856802e-04]
4.2 用因子图实现SE(2)手眼标定
常用的手眼标定算法本质上是在SE(3)空间里求解 AX=XB 方程。因为 MG400 只有4个自由度,简单起见只在SE(2)空间标定。
为了避免求解非线性方程,采用基于因子图的优化方法实现手眼标定。采用 SymForce(快速符号计算与优化框架) 实现:

from symforce import sympy as sm
from symforce import geo
from symforce import typing as T
def aruco_residual(
T_base_tag: geo.Pose2, T_tool_cam : geo.Pose2, measure_base_tool : geo.Pose2, measure_cam_tag : geo.Pose2, epsilon : T.Scalar
) -> geo.V3:
T_base_tag_predicted = measure_base_tool * T_tool_cam * measure_cam_tag
tangent_vec = (T_base_tag_predicted * T_base_tag.inverse()).to_tangent(epsilon=epsilon)
return geo.V3(tangent_vec)
from symforce.opt.factor import Factor
num_measure = 5
factors = []
for i in range(num_measure):
factors.append(Factor(
residual=aruco_residual,
keys=[f"T_base_tag", f"T_tool_cam", f"measure_base_tool[{i}]", f"measure_cam_tag[{i}]", "epsilon"]
))
from symforce.opt.optimizer import Optimizer
optimizer = Optimizer(
factors=factors,
optimized_keys=[f"T_base_tag", f"T_tool_cam"],
debug_stats=True
)
import numpy as np
from symforce.values import Values
initial_values = Values(
T_base_tag=geo.Pose2(R = geo.Rot2.identity(), t = geo.Vector2(0.39, 0)),
T_tool_cam=geo.Pose2(R = geo.Rot2.from_angle(-2.73144), t = geo.Vector2(-0.0287074, -0.0342912)),
measure_base_tool=[
geo.Pose2(R = geo.Rot2.from_angle(2.88934), t = geo.Vector2(0.35113, 0.0385629)),
geo.Pose2(R = geo.Rot2.from_angle(2.88944), t = geo.Vector2(0.351131,0.0385618)),
geo.Pose2(R = geo.Rot2.from_angle(2.72775), t = geo.Vector2(0.353217, -0.0041673)),
geo.Pose2(R = geo.Rot2.from_angle(2.49733), t = geo.Vector2(0.34512 ,-0.0753108)),
geo.Pose2(R = geo.Rot2.from_angle(1.98388), t = geo.Vector2(0.351387, -0.0361516))
],
measure_cam_tag=[
geo.Pose2(R = geo.Rot2.from_angle(-0.147354), t = geo.Vector2(-0.00381149, -0.0745884)),
geo.Pose2(R = geo.Rot2.from_angle(-0.148410), t = geo.Vector2(-0.0038226, -0.0746155)),
geo.Pose2(R = geo.Rot2.from_angle(0.0124934), t = geo.Vector2(0.00169984, -0.0248769)),
geo.Pose2(R = geo.Rot2.from_angle(0.2473300), t = geo.Vector2(-0.00783419, 0.0562505)),
geo.Pose2(R = geo.Rot2.from_angle(0.7639740), t = geo.Vector2(-0.0282627, 0.0315999))
],
epsilon=sm.default_epsilon
)
result = optimizer.optimize(initial_values)
print("initial_values", result.initial_values)
print("optimized_values", result.optimized_values)
标定结果
initial_values:
T_base_tag: <Pose2 R=<Rot2 <C real=1, imag=0>>, t=(0.39, 0)>
T_tool_cam: <Pose2 R=<Rot2 <C real=-0.917059962986112, imag=-0.398749325125336>>, t=(-0.0287074, -0.0342912)>
optimized_values:
T_base_tag: <Pose2 [0.9999997948860889, -0.0006404902656193984, 0.3957076122309438, -0.009644956111152432]>
T_tool_cam: <Pose2 [-0.9219164600501261, -0.38738874620804986, -0.030012402591907537, -0.03395704905415254]>
4.3 控制流程

TODO
- Sync
- Collision Detection using Spring
- BehaviorTree.CPP
References