构建 2.5D/3D 导航地图
人类与足式机器人的活动区域位于地球表面,属于曲面(2.5D $\in$ 3D)。目前大部分移动机器人自主导航时仅能感知 2D 平面空间信息,如常用的 costmap_2d,缺点在于难以适应复杂地形,如斜坡、楼梯等。为此,足式机器人需要实时构建稠密的 2.5D 或 3D 地图。
常用地图
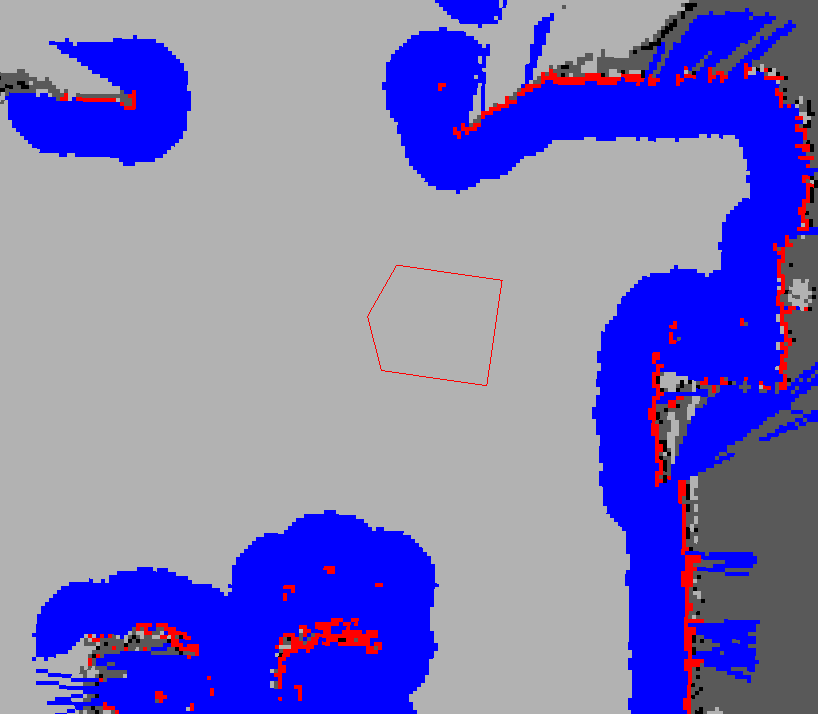




地图解析
- 路面 Terrain
- 障碍 Obstacle

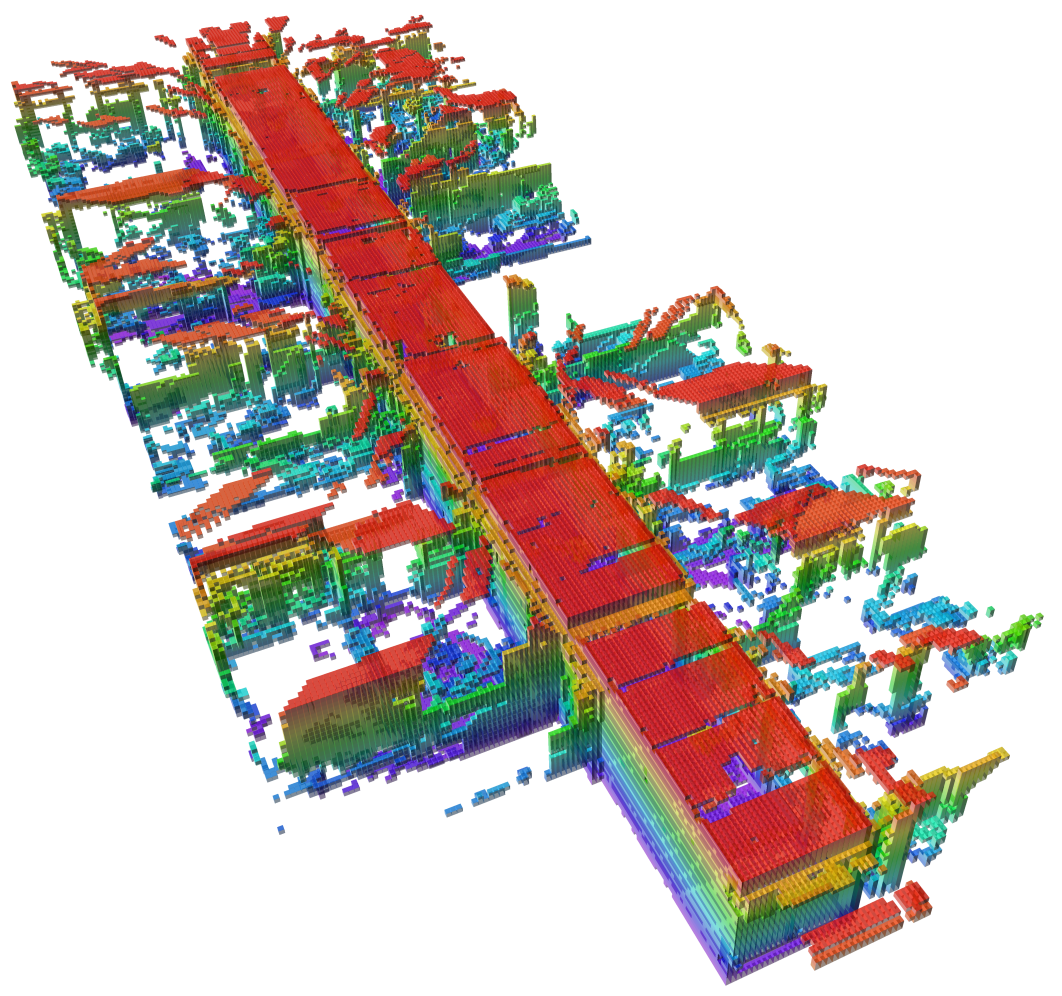
人类与足式机器人的活动区域位于地球表面,属于曲面(2.5D $\in$ 3D)。目前大部分移动机器人自主导航时仅能感知 2D 平面空间信息,如常用的 costmap_2d,缺点在于难以适应复杂地形,如斜坡、楼梯等。为此,足式机器人需要实时构建稠密的 2.5D 或 3D 地图。
常用地图
地图解析