TheiaSfM & MVE 实践指南
Theia:基于 Eigen3 和 Ceres 的 SfM 库,含高质量的算法实现;
MVE:易用的基于图像三维建模的框架。
代码结构
- Image
- Features = Keypoints + Descriptors
- Matching
- RANSAC
- Pose and Resectioning(Calibration $\mathbf{P_{3\times 4}}$)
- P3P
- A Novel Parameterization of the Perspective-Three-Point Problem for a direct computation of Absolute Camera position and Orientation
- 5点解E $E=[t]_{\times} * R,\quad y^\top * E * x = 0$
- Recent Developments on Direct Relative Orientation
- 4点解H
- DLT@MVG
- 8点解F $x’ F x = 0$
- @MVG
- PnP(Perspective N-Point)
- A Direct Least-Squares (DLS) Method for PnP
- Four Point Focal Length
- Five Point Focal Length and Radial Distortion
- Three Point Relative Pose with a Partially Known Rotation
- Four Point Relative Pose with a Partially Known Rotation
- Two Point Absolute Pose with a Partially Known Rotation
- P3P
- Math
- N次多项式解析解(N<4)
- N次多项式迭代解
- Sequential Probability Ratio Test(SRPT)?
- Camera Models
- Pinhole Camera Model \(K = \begin{bmatrix}f & s & p_x \\ 0 & f * a & p_y \\ 0 & 0 & 1 \end{bmatrix}\)
- Fisheye Camera Model \(r = \sqrt{x^2 + y^2} \theta = atan2(r, |z|) \\ \theta_d = \theta (1 + k1 *\theta^2 + k2* \theta^4 + k3 *\theta^6 + k4* \theta^8) \\ x' = \theta_d *x / r \\ y' = \theta_d* y / r\)
- SfM
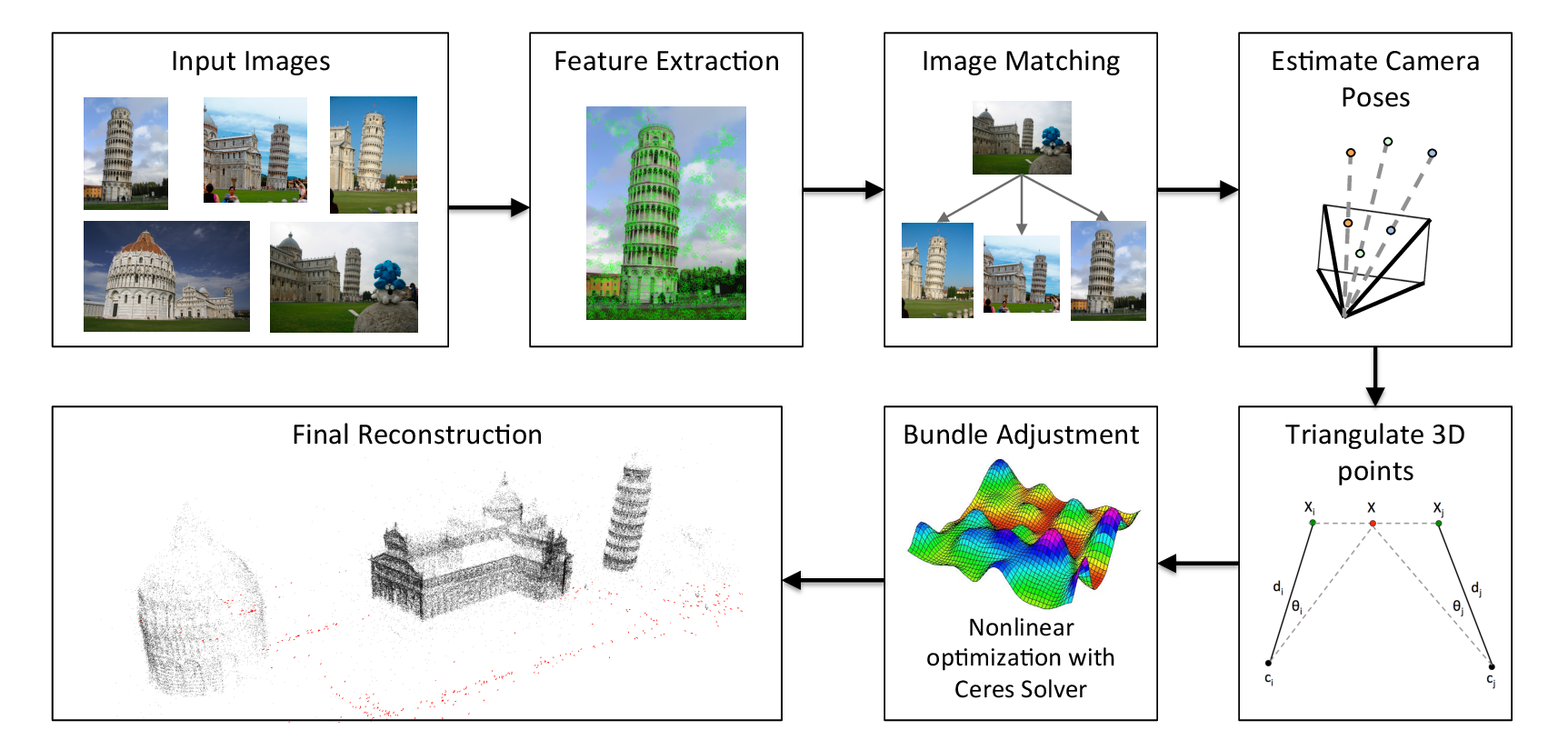
- Pipeline
- 特征提取
- 特征匹配
- 位姿估计
- Estimate camera poses from two-view matches and geometries using incremental or global SfM
- 三角化
- BA优化(调用 Ceres)
- 基本数据结构
- View
- Track
- Reconstruction = Views + Tracks
- ViewGraph = View(Vertex) + TwoViewInfo(Edge)
- Pipeline

Incremental SfM Pipeline
The incremental SfM pipeline is as follows:
- Choose an initial camera pair to reconstruct.
- Estimate 3D structure of the scene.
- Bundle adjustment on the 2-view reconstruction.
- Localize a new camera to the current 3D points. Choose the camera that observes the most 3D points currently in the scene.
- Estimate new 3D structure.
- Bundle adjustment if the model has grown by more than 5% since the last bundle adjustment.
- Repeat steps 4-6 until all cameras have been added.
Global SfM Pipeline
- Create the initial view graph from 2-view matches and
TwoViewInfothat describes the relative pose between matched images.- Filter initial view graph and remove outlier 2-view matches.
- Calibrate internal parameters of all cameras (either from EXIF or another calibration method).
- Estimate global orientations of each camera with a
RotationEstimator- Filter the view graph: remove any TwoViewInfos where the relative rotation does not agree with the estimated global rotations.
- Refine the relative translation estimation to account for the estimated global rotations.
- Filter any bad
TwoViewInfobased on the relative translations.- Estimate the global positions of all cameras from the estimated rotations and
TwoViewInfousing aPositionEstimator- Estimate 3D points.
- Bundle adjust the reconstruction.
- (Optional) Attempt to estimate any remaining 3D points and bundle adjust again.
三维重建
参考官网说明安装TheiaSfM和MVE,MVE带三维重建的整个流程,MVE的依赖项少,编译安装相对轻松,核心操作流程包括:
- Creating a dataset, by converting input photos into the MVE File Format.
- Structure from Motion, which reconstructs the camera parameters.
- Multi-View Stereo, which reconstructs dense depth maps for each photo.
- Surface Reconstruction, which reconstructs a surface mesh.
对应程序执行如下
makescene -i <image-dir> <scene-dir>
sfmrecon <scene-dir>
dmrecon -s2 <scene-dir>
scene2pset -F2 <scene-dir> <scene-dir>/pset-L2.ply
fssrecon <scene-dir>/pset-L2.ply <scene-dir>/surface-L2.ply
meshclean -t10 <scene-dir>/surface-L2.ply <scene-dir>/surface-L2-clean.ply
实践中发现,MVE的SfM执行最耗时间,最近刚好又在学习Theia,故想到用Theia代替MVE的SfM:
- 先用
convert_theia_reconstruction_to_bundler_file.cc把Theia的SfM结果进行转换Bundler的格式; - 用
makescene -bundle-id=0 ......生成MVE格式; - 最后安装MVE流程执行稠密重建MVS生成若干深度图,深度图融合生成稠密点云,表面重建。
NB:执行dmrecon前需要修改list.txt中的图像名,否则无法生成深度图!
实验结果
用iPhone SE采集了19张图像,用TheiaSfM代替MVE自带的SfM可以节省30%的时间,重建结果如下:

细心的你通过观察发现,弱纹理的区域很难重建,会出现空洞。