相机和IMU同步方案[译]
原文:ROS CAMERA AND IMU SYNCHRONIZATION
Idea
针对 VIO 和 SLAM 应用,我们需要实现相机和 IMU 的硬件时间同步(微秒级的精度):
time: 0 ms, IMU data, camera image #0
time: 5 ms, IMU data
time: 10 ms, IMU data
...
time: 50 ms, IMU data, camera image #1
time: 55 ms, IMU data
time: 60 ms, IMU data
...
time: 100 ms, IMU data, camera image #2
...
我的配置
我将介绍自己的配置细节,同样适合于你们自己的硬件。
- 单目全局相机(型号:mvBlueFox-MLC200wG, ON Semiconductor MT9V034 digital image sensor),USB 接口(注:含用于硬件同步的外部触发引脚)
- 132 度鱼眼镜头
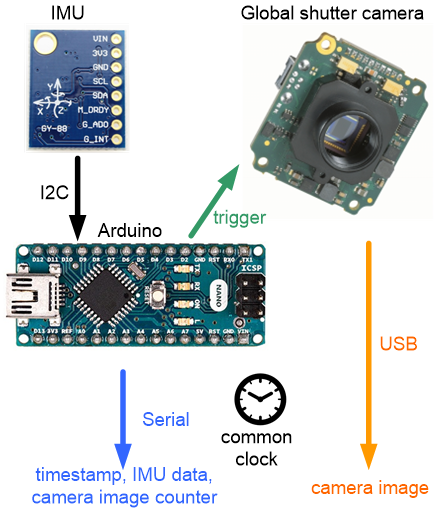
- IMU(MPU6050),与 Arduino Nano 相连

概述
Arduino 以毫秒级精度计算 IMU 测量(200Hz)数据的时间戳。于特定时间戳(20Hz)经过触发线触发相机捕获图像。时间戳和触发计数器数据会发送给 PC(IMU 节点)。IMU 节点从 Arduino 接收 IMU 数据,并通过一个新的 ROS TimeRefere 消息(topic/imu/trigger_time)发布时间数据。相机节点订阅时间数据为每一种图像校准时间。故消息流如下:
IMU –> Arduino –> PC (ROS IMU node) –> ROS camera node
ROS trigger_time 通过 IMU 节点发布消息如下所示:
/imu/trigger_time (TimeReference):
header.seq --> image sequence (triggerCounter)
header.stamp --> timestamp of image
Arduino
-
先把相机的触发线(digital input 0)和 Arduino 的 D5 引脚相连。
-
编写程序 src/MPU6050.ino
-
给 IMU 数据(200Hz)加上时间戳
-
以 20Hz 的频率触发相机
volatile unsigned long irqTimestamp = 0; volatile unsigned long triggerCounter = 0; volatile byte irqCounter = 0; // called by MPU6050 interrupt void dmpDataReady() { irqTimestamp = millis(); irqCounter++; if (irqCounter == 10){ // trigger cam @20 Hz digitalWrite(TRIGGER_PIN, HIGH); digitalWrite(TRIGGER_PIN, LOW); triggerCounter++; irqCounter = 0; } }
-
-
在发送给 PC 的消息中添加时间戳和触发计数器。利用时间戳和触发计数器,PC可以实现
- 校准 IMU 时间
- 校准相机时间和确定图像编号
ROS: mpu6050_serial_to_imu
-
编写 src/mpu6050_serial_to_imu_node.cpp,用来接收来自 Arduino 的时间戳和触发计数器的消息。
-
添加发布“trigger_time”,用于发布 IMU 节点的时间戳。相机节点随后订阅它们:
ros::Publisher trigger_time_pub = nh.advertise<sensor_msgs::TimeReference>("trigger_time", 50); -
发布消息:
ros::Time measurement_time(ts / 1000, (ts % 1000) * 1000*1000); // sec, nsec ros::Time time_ref(0, 0); trigger_time_msg.header.frame_id = frame_id; trigger_time_msg.header.stamp = measurement_time; trigger_time_msg.time_ref = time_ref; trigger_time_pub.publish(trigger_time_msg);
ROS: bluefox2
-
安装 ROS bluefox2 包
-
编写 src/single/single_node.cpp,用于相机节点订阅新的 trigger_time 消息:
subTimeRef = pnh.subscribe("/imu/trigger_time", 1000, &bluefox2::SingleNode::callback, this); void SingleNode::callback(const sensor_msgs::TimeReference::ConstPtr &time_ref) { bluefox2::TriggerPacket_t pkt; pkt.triggerTime = time_ref->header.stamp; pkt.triggerCounter = time_ref->header.seq; fifoWrite(pkt); } -
修改 ‘Aquire’ 方法,为每张图片盖上时间戳:
void SingleNode::Acquire() { while (is_acquire() && ros::ok()) { bluefox2_ros_->RequestSingle(); // wait for new trigger packet to receive TriggerPacket_t pkt; while (!fifoRead(pkt)) { ros::Duration(0.001).sleep(); } // a new video frame was captured // check if we need to skip it if one trigger packet was lost if (pkt.triggerCounter == nextTriggerCounter) { bluefox2_ros_->PublishCamera(pkt.triggerTime); } else { ROS_WARN("trigger not in sync (seq expected %10u, got %10u)!", nextTriggerCounter, pkt.triggerCounter); } nextTriggerCounter++; Sleep(); } } -
修改相机启动文件(launch/single_node.launch)
- 关闭自动曝光时间,采用固定曝光时间。以此才能根据触发时间戳计算最后图像的时间戳
- 用触发引脚(高电平触发)作为 camera digital input 0:
<arg name="aec" default="false"/> <arg name="expose_us" default="15000"/> <!-- Trigger mode (ctm): 1=on demand (default), 3=hardware trigger --> <arg name="ctm" default="3"/> <arg name="cts" default="0"/> -
为了让 IMU 节点和相机节点同时启动,在相机节点启动文件(launch/single_node.launch)里加入 IMU 节点:
<node pkg="mpu6050_serial_to_imu" type="mpu6050_serial_to_imu_node" name="mpu6050_serial_to_imu_node" required="true"> <param name="port" value="/dev/ttyUSB0"/> </node> -
运行相机启动文件:
roslaunch bluefox2 single_node.launch -
确认未遗漏任何时间消息。