Onshape-to-Robot 处理流程
本文翻译自 onshape-to-robot 文档:Processors。
引言
onshape-to-robot 的流水线(pipeline)分为三步:
- 从 Onshape 获取装配体,生成机器人的中间表示(intermediate representation)。
- 参见:robot.py
- 对该中间表示执行一系列操作——这些操作称为处理器(processors),下文列出了部分处理器。
- 通过导出器(exporter)将机器人导出为所需格式(URDF、MuJoCo 等)。

提示:
export.py脚本是onshape-to-robot命令的入口,概括了上述三步流水线。如果你想在处理过程中调整机器人参数,可以查看该脚本。参见:export.py
获取模式与转换模式
你可以通过向 onshape-to-robot 命令传递 --retrieve 参数,只运行第 (1) 步获取。这会将机器人的中间表示保存为 robot.pkl 文件到输出目录中。
第 (2) 步和第 (3) 步可以通过 --convert 参数单独运行,从 robot.pkl 加载数据、执行处理器并生成最终输出。这样在调整处理器或导出器时,无需反复向 Onshape 发送 API 请求。
--save-pickle 参数在获取完成后保存数据,同时继续执行转换步骤。
1. Ball to Euler(球铰 → 欧拉角)
简介
此处理器将球铰关节(ball joint)转换为三个旋转关节(revolute joints),以便在不支持球铰的下游模拟器或工具中使用。
config.json 配置项
{
// ...
// 通用导入选项(参见 config.json 文档)
// ...
// 将球铰转换为欧拉角(默认:false)
"ball_to_euler": true,
// 欧拉角顺序(默认:"xyz")
"ball_to_euler_order": "xyz"
}
ball_to_euler(默认:false)
设为 true 时,所有球铰关节都会被转换为欧拉角。也可以传入一个关节名称列表(支持通配符)来选择性地转换:
{
// 使用特定关节列表,支持通配符
"ball_to_euler": ["joint1", "shoulder_*"]
}
ball_to_euler_order(默认:"xyz")
控制欧拉角的旋转顺序。有效值:xyz、xzy、zyx、zxy、yxz、yzx。
2. Merge STLs(合并 STL 网格)
简介
此处理器将同一连杆(link)内所有零件的网格合并为一个整体网格。
config.json 配置项
{
// ...
// 通用导入选项(参见 config.json 文档)
// ...
// 合并 STL 网格(默认:false)
"merge_stls": true
}
merge_stls(默认:false)
设为 true 时,每个连杆的零件网格将合并为一个。合并后的零件以连杆名称命名。
支持三种取值:
true— 合并视觉网格和碰撞网格"visual"— 仅合并视觉网格"collision"— 仅合并碰撞网格
3. Simplify STLs(简化 STL 网格)
简介
此处理器简化 STL 文件,使其大小不超过预设限制。与 Merge STLs 配合使用时,可以简化合并后的网格。
依赖要求
需要安装 pymeshlab:
pip install pymeshlab
config.json 配置项
{
// ...
// 通用导入选项(参见 config.json 文档)
// ...
// 简化 STL 网格(默认:false)
"simplify_stls": true,
// STL 文件最大大小,单位 MB(默认:3)
"max_stl_size": 1
}
simplify_stls(默认:false)
启用后,STL 文件将被简化。
max_stl_size(默认:3)
文件大小阈值(MB),超过此值的文件会被简化。也可设为 "visual"(仅简化视觉网格)或 "collision"(仅简化碰撞网格)。
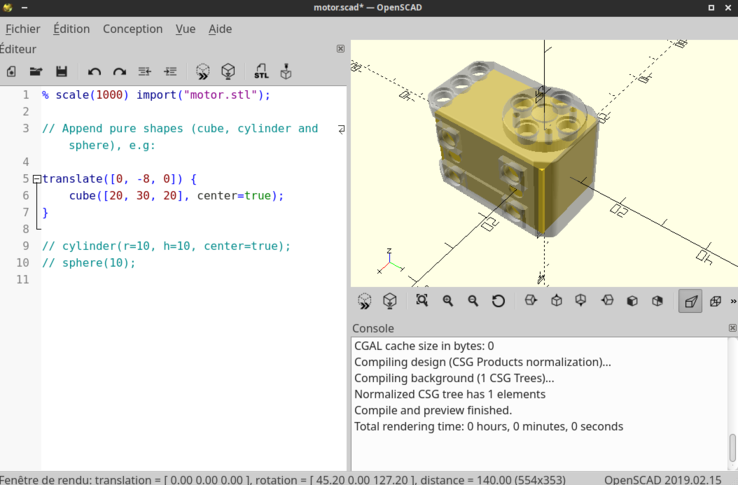
4. OpenSCAD 纯形状逼近
📺 视频教程:YouTube(部分步骤已过时,但整体思路不变)
简介
此处理器允许用户手动将机器人各个部分逼近为纯几何形状。
依赖要求
需要安装 OpenSCAD:
sudo apt-get install openscad
处理流程
启用后,处理器会检查输出目录中是否存在 .scad 文件。若找到,则解析这些文件并导出纯几何形状。
注意:导出器将使用纯几何形状进行碰撞检测,而非原始网格。
可以使用以下命令对特定 .stl 进行逼近:
onshape-to-robot-edit-shape <path_to_stl>
这将打开与 .stl 同名的 .scad 文件的编辑窗口,在此处定义的纯几何形状将用作逼近。
config.json 配置项
{
// ...
// 通用导入选项(参见 config.json 文档)
// ...
// 使用 OpenSCAD 纯形状逼近(默认:false)
"use_scads": true,
// 放大/缩小纯形状的比例(默认:0.0)
"pure_shape_dilatation": 0.0
}
use_scads(默认:false)
设为 true 时,处理器将使用 OpenSCAD 纯形状逼近。
pure_shape_dilatation(默认:0.0)
浮点数参数,用于放大或缩小纯形状以避免碰撞。建议使用负值来缩小形状。
5. Adding dummy base link(添加虚拟基座)
简介
此处理器向机器人添加一个名为 base_link 的虚拟基座,该基座通过 fixed 关节连接到机器人。
config.json 配置项
{
// ...
// 通用导入选项(参见 config.json 文档)
// ...
// 添加虚拟基座连杆(默认:false)
"add_dummy_base_link": true
}
add_dummy_base_link(默认:false)
设为 true 时,将在机器人中添加一个虚拟基座连杆。
6. Removing collision meshes(移除碰撞网格)
简介
此处理器确保不输出任何碰撞网格。
备选方案:也可以使用 ignore 列表来实现:
{ "ignore": { "*": "collision" } }但需注意,这种替代方法会阻止网格被其他处理器使用(例如,无法再用纯形状进行逼近)。
config.json 配置项
{
// ...
// 通用导入选项(参见 config.json 文档)
// ...
// 移除碰撞网格
"no_collision_meshes": true
}
no_collision_meshes(默认:false)
设为 true 时,碰撞网格将被移除。
7. Use collisions as visual(碰撞网格用作视觉)
简介
启用此处理器后,碰撞几何体将被复用为视觉几何体。适用于两种场景:
- 调试 — 当下游工具不方便可视化碰撞几何时
- 轻量化 — 创建加载更快的模型
config.json 配置项
{
// ...
// 通用导入选项(参见 config.json 文档)
// ...
// 将碰撞网格用作视觉网格
"collisions_as_visual": true
}
collisions_as_visual(默认:false)
设为 true 时,碰撞网格将被用作视觉网格。
8. Convex decomposition / CoACD(凸分解)
简介
启用此处理器后,碰撞网格将使用 CoACD 算法进行凸分解。
config.json 配置项
{
// ...
// 通用导入选项(参见 config.json 文档)
// ...
// 启用凸分解
"convex_decomposition": true,
// 使用彩虹色替代零件原有颜色
"rainbow_colors": true
}
convex_decomposition(默认:false)
设为 true 时,将对碰撞网格应用 CoACD 凸分解。
rainbow_colors(默认:false)
启用后,碰撞网格将使用彩虹色进行着色,而非零件原有颜色。
9. Using fixed links(使用固定连杆)
简介
此处理器将所有零件拆分为独立的连杆(link),每个零件通过 fixed 关节与其父级关联。
注意:这样做可能会导致物理引擎性能下降,但适用于调试场景。
config.json 配置项
{
// ...
// 通用导入选项(参见 config.json 文档)
// ...
// 添加固定连杆,每个零件一个连杆
"use_fixed_links": true
}
use_fixed_links(默认:false)
设为 true 时,将向机器人添加固定连杆。也可以传入一个列表,指定需要生成固定连杆的特定连杆名称。
10. Writing & registering custom Processor(编写和注册自定义处理器)
简介
所有默认注册的处理器描述可以在项目 GitHub 源码(processors.py)中找到。用户可以编写自己的处理器类,并通过 config.json 注册到流水线中。
最小处理器示例
# my_project/my_custom_processor.py
from onshape_to_robot.processor import Processor
from onshape_to_robot.config import Config
from onshape_to_robot.robot import Robot
class MyCustomProcessor(Processor):
def __init__(self, config: Config):
super().__init__(config)
self.use_my_custom: bool = config.get("use_my_custom", False)
def process(self, robot: Robot):
if self.use_my_custom:
print(f"Custom processing for {robot.name} with custom processor.")
处理器处理的是机器人的中间表示(参见 robot.py)。
注册你的处理器
要注册自定义处理器,在 config.json 中添加 "processors" 条目,格式为 module_path:ClassName:
{
"processors": [
// 自定义处理器
"my_project.my_custom_processor:MyCustomProcessor",
// 默认处理器
"ProcessorScad",
"ProcessorMergeParts",
"ProcessorNoCollisionMeshes"
]
}
现有的默认处理器列表参见 GitHub 源码 processors.py。